Eleanor Lim's Coding Projects
My name is Eleanor , and I am 12 years old. I started learning robotics with LEGO Mindstorms and block-based coding in Primary 4. I enjoy designing and building robots and structures that automate routine tasks in my daily life. Learning robotics taught me to solve real-world problems and inspired me to explore beyond block-based coding. This sparked my interest in Python, where I began writing programs to solve math problems without using pen and paper. As I strengthened my Python skills, I also learned Pygame and created educational games that my friends could play and compete in. I have documented my journey in robotics, coding, innovation, and STEM.

Touch activated car
I learned how to use LEGO Technic parts to design and build functional mechanical systems. By applying coding concepts such as conditionals (if-else) and integrating various sensors, I programmed my creations to respond dynamically to their environment. One example was a car that automatically reverses when its front touch sensor detects something, similar to a collision—mimicking real-world application of obstacle detection used in autonomous vehicles and robotic systems to enhance safety and navigation.

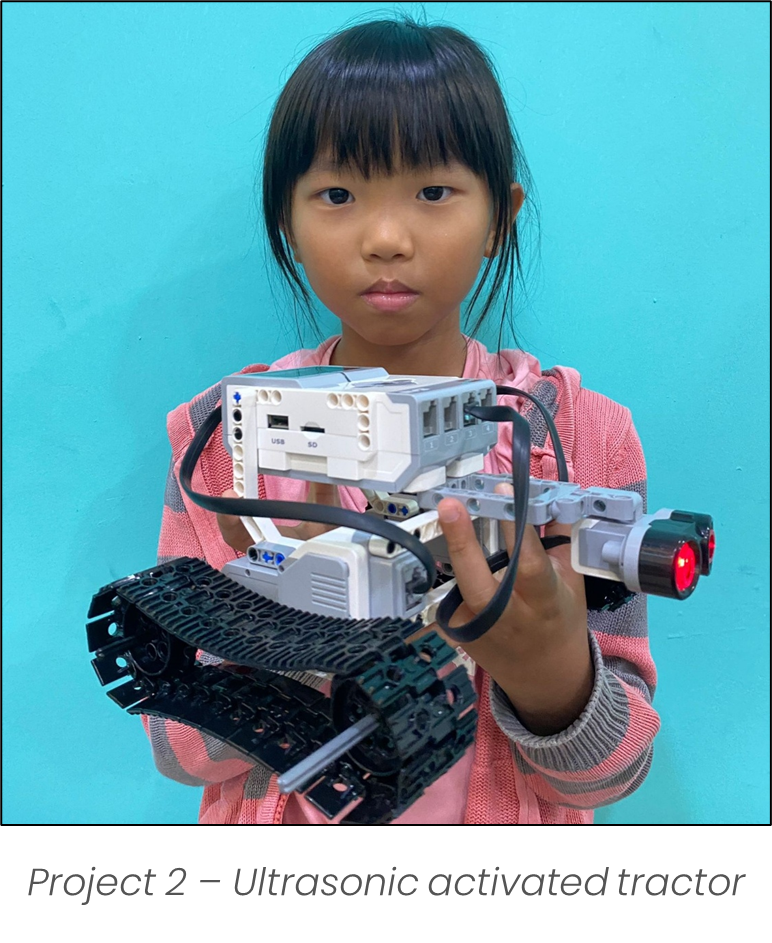
Ultrasonic Activated Tractor
I learned how to use LEGO Technic parts to design and build various mechanical structures. By applying coding concepts such as conditionals (if-else) and incorporating different sensors, I built a tractor. Using the ultrasonic sensor, the tractor moves when it detects a load on it.
Colour activated shooter
Having played at the arcade frequently, I decided to use the concepts of conditional statements, colour detection and output controls to create a secure and precise shooter that fires a shot when the colour sensor detects 2 specific colours in the coded order.

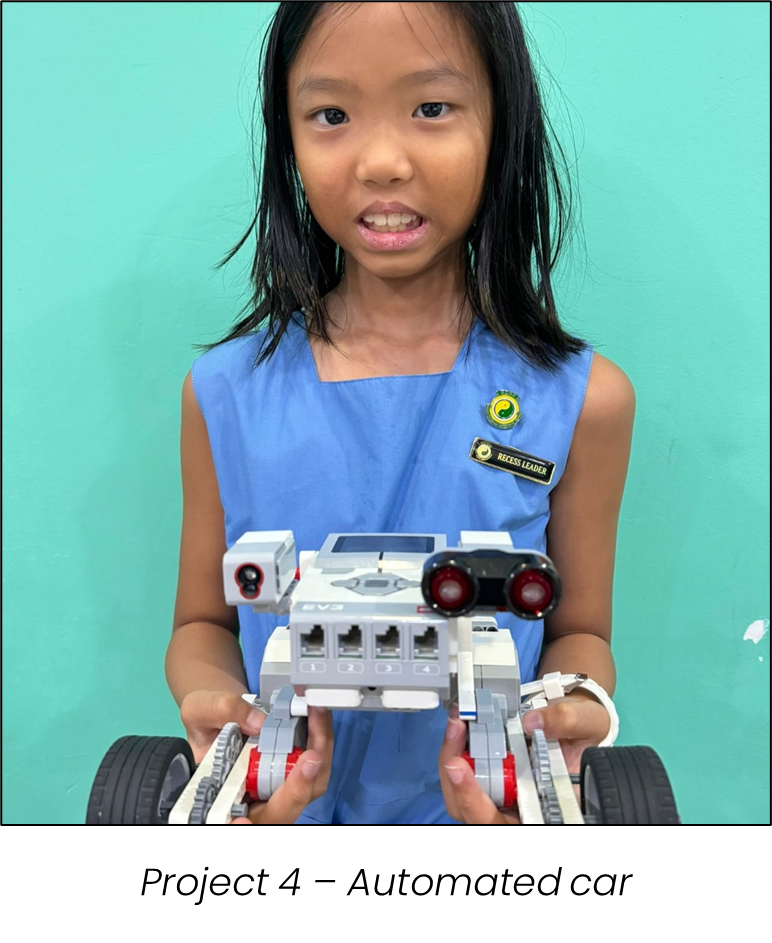
Automated car
I learned how to use LEGO Technic parts to design and build various mechanical structures. By applying coding concepts such as conditionals (if-else) and incorporating different sensors, I built a tractor. Using the ultrasonic sensor. The tractor moves when it detects the load on it. Such autonomous track-based vehicles are used to transport goods between different stations. Once the sensor detects the object, the vehicle automatically moves to deliver the item to the designated location. This automation reduces the need for human labor, increases efficiency, and ensures precise handling of materials.
Follow The Line
Inspired by a line-following robot I observed at the library—used to transport books from the return bin to the sorting section—I decided to design a similar robot for home use. My version is programmed to follow a black line on the floor, allowing it to navigate efficiently through designated areas that require cleaning.
Touch Activated Treadmill
As someone who enjoys exercising on a treadmill, I decided to recreate an automated treadmill using LEGO Technic parts. This miniature version functions similarly to a real treadmill—its speed is controlled by user input. With the use of a touch sensor, and coding concepts such as variables and if-else statements, the treadmill increases speed with each press—just like speed adjustments on a real gym machine.